נסתכל עכשיו על שתי מפות המושגים שהופיעו בפרקים 0 ו- 4.
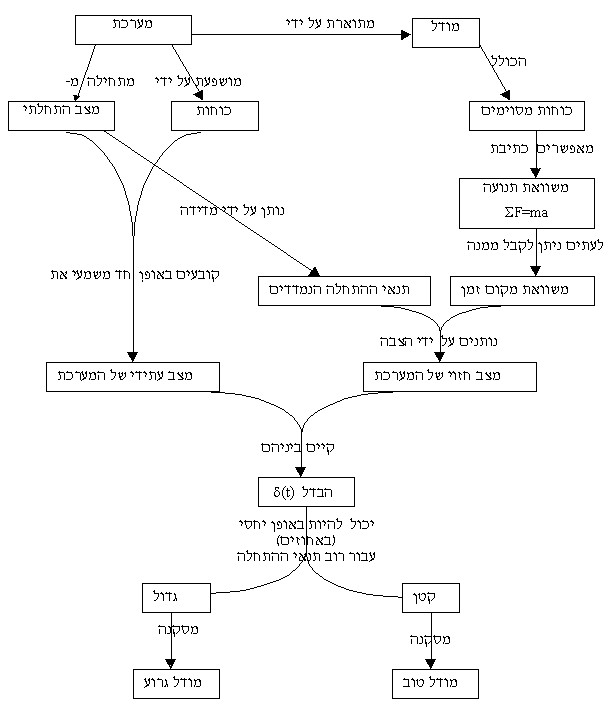
מפה 1
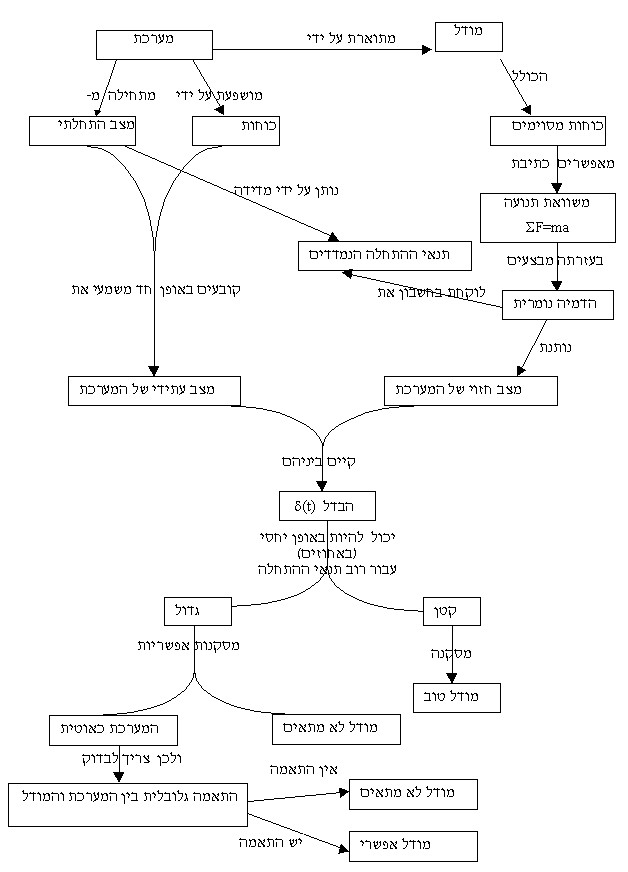
מפה 2
קודם נבדוק אם אנו באמת מבינים אותן:
(אנו מציעים לך שתענה על השאלות לבד, ורק אז תאמת את תשובותיך עם התשובות הרשומות)
1) בשתי המפות יש שתי "עמודות": באחת מהן כתוב מערכת ובשניה מודל. מהו ההבדל ביניהם?
2) בשתי המפות אנו יכולים לכתוב את משוואות התנועה (ΣF=ma), והן אלה שקובעות את התפתחות המערכת באופן חד משמעי. מערכת עבורה משוואות התנועה הן הקובעות את התפתחותה באופן חד משמעי נקראת…
3) ההבדל בין שתי המפות היא שהשנייה מתייחסת למקרה כללי, והראשונה מתייחסת למקרה בו ניתן לקבל ממשוואות התנועה את המשוואות מקום זמן (כגון: (x=x0+v0t+1/2at2 . מתי דבר זה אפשרי?
נניח עכשיו שהמערכת שלנו "טובה"; כלומר, אפשר לכתוב עבורה משוואת מקום זמן (מפה 1).
4) איך נעשה כדי לקבל את מצב המערכת בזמן t?
5) מנה שתי סיבות לכך שהמצב החזוי לא זהה למצב האמיתי, אלא דומה לו.
שים לב! במקרה זה, δ גדול משמעותו מודל גרוע. כלומר, כשקיימת משוואת מקום זמן, המערכת "טובה", ואם המודל שבנינו הוא טוב, אנו מצפים להתאמה בין המצב המצוי לחזוי (זכור את הדוגמה של הקפיץ, בה ראינו בגיליון אלקטרוני ש- Δx לא גדל עם הזמן).
6) נסתכל עכשיו במפה 2. לפי המפה הזו, קיום הבדל δ(t) גדול בין המצב החזוי של המערכת והמצב האמיתי אינו מעיד בהכרח על מודל גרוע. מדוע?
![]()
![]()
